abbreviations
c 1 = cos ( θ 1 ) c1 = \cos(\theta_1) c 1 = cos ( θ 1 ) c 2 = cos ( θ 2 ) c2 = \cos(\theta_2) c 2 = cos ( θ 2 ) c 3 = cos ( θ 3 ) c3 = \cos(\theta_3) c 3 = cos ( θ 3 ) s 12 = sin ( θ 1 + θ 2 ) s_{12} = \sin(\theta_1 + \theta_2) s 12 = sin ( θ 1 + θ 2 ) c 123 = cos ( θ 1 + θ 2 + θ 3 ) c_{123} = \cos(\theta_1 + \theta_2 + \theta_3) c 123 = cos ( θ 1 + θ 2 + θ 3 ) c 23 = cos ( θ 2 + θ 3 ) c_{23} = \cos(\theta_2 + \theta_3) c 23 = cos ( θ 2 + θ 3 )
link 1:
x c 1 = l 1 2 c 1 , y c 1 = l 1 2 s 1 v c 1 2 = ( l 1 2 ) 2 θ ˙ 1 2 \begin{align*}
&x_{c1} = \frac{l_1}{2}c_1 ,\space y_{c1} = \frac{l_1}{2}s_1 \\
&v_{c1}^2 = (\frac{l_1}{2})^2\dot{\theta}_1^2
\end{align*} x c 1 = 2 l 1 c 1 , y c 1 = 2 l 1 s 1 v c 1 2 = ( 2 l 1 ) 2 θ ˙ 1 2 kinetic energy
1 2 m 1 v c 1 2 = 1 8 m 1 l 1 θ ˙ 1 2 \frac{1}{2}m_1v_{c1}^2 = \frac{1}{8} m_1 l_1\dot{\theta}_1^2 2 1 m 1 v c 1 2 = 8 1 m 1 l 1 θ ˙ 1 2 link 2:
x c 2 = l 1 c 1 + l 2 2 c 12 , y c 2 = l 1 s 1 + l 2 2 s 12 v c 2 2 = l 1 2 θ ˙ 1 2 + ( l 2 2 ) 2 ( θ ˙ 1 + θ ˙ 2 ) 2 + l 1 l 2 θ ˙ 1 ( θ ˙ 1 + θ ˙ 2 ) c 2 \begin{align*}
&x_{c2} = l_1c_1 + \frac{l_2}{2}c_{12} ,\space y_{c2} = l_1s_1 + \frac{l_2}{2}s_{12} \\
&v_{c2}^2 = l_1^2\dot{\theta}_1^2 + (\frac{l_2}{2})^2(\dot{\theta}_1+\dot{\theta}_2)^2 + l_1l_2\dot{\theta}_1(\dot{\theta}_1+\dot{\theta}_2)c2
\end{align*} x c 2 = l 1 c 1 + 2 l 2 c 12 , y c 2 = l 1 s 1 + 2 l 2 s 12 v c 2 2 = l 1 2 θ ˙ 1 2 + ( 2 l 2 ) 2 ( θ ˙ 1 + θ ˙ 2 ) 2 + l 1 l 2 θ ˙ 1 ( θ ˙ 1 + θ ˙ 2 ) c 2 kinetic energy
1 2 m 2 v c 2 2 = 1 2 m 2 l 1 2 θ ˙ 1 2 + 1 8 m 2 l 2 2 ( θ ˙ 1 + θ ˙ 2 ) 2 + 1 2 m 2 l 1 l 2 θ ˙ 1 ( θ ˙ 1 + θ ˙ 2 ) c 2 \frac{1}{2}m_2v_{c2}^2 = \frac{1}{2}m_2l_1^2\dot{\theta}_1^2 + \frac{1}{8}m_2l_2^2(\dot{\theta}_1+\dot{\theta}_2)^2 + \frac{1}{2}m_2l_1l_2\dot{\theta}_1(\dot{\theta}_1+\dot{\theta}_2)c2 2 1 m 2 v c 2 2 = 2 1 m 2 l 1 2 θ ˙ 1 2 + 8 1 m 2 l 2 2 ( θ ˙ 1 + θ ˙ 2 ) 2 + 2 1 m 2 l 1 l 2 θ ˙ 1 ( θ ˙ 1 + θ ˙ 2 ) c 2 link 3:
x c 3 = l 1 c 1 + l 2 c 12 + l 3 2 c 123 y c 3 = l 1 s 1 + l 2 s 12 + l 3 2 s 123 v c 3 2 = x ˙ c 3 2 + y ˙ c 3 2 \begin{align*}
x_{c3} &= l_1c_1 + l_2c_{12} + \frac{l_3}{2}c_{123} \\
y_{c3} &= l_1s_1 + l_2s_{12} + \frac{l_3}{2}s_{123} \\
v_{c3}^2 &= \dot{x}_{c3}^2 + \dot{y}_{c3}^2
\end{align*} x c 3 y c 3 v c 3 2 = l 1 c 1 + l 2 c 12 + 2 l 3 c 123 = l 1 s 1 + l 2 s 12 + 2 l 3 s 123 = x ˙ c 3 2 + y ˙ c 3 2 v c 3 2 = l 1 2 q ˙ 1 2 + l 2 2 q ˙ 12 2 + ( l 3 2 ) 2 q ˙ 123 2 + 2 l 1 l 2 q ˙ 1 q ˙ 12 c 2 + l 2 l 3 q ˙ 12 q ˙ 123 c 3 + l 1 l 3 q ˙ 1 q ˙ 123 c 23 v_{c3}^2 = l_1^2 \dot{q}_1^2 + l_2^2 \dot{q}_{12}^2 + (\frac{l_3}{2})^2 \dot{q}_{123}^2 + 2 l_1 l_2 \dot{q}_1 \dot{q}_{12} c_2 + l_2 l_3 \dot{q}_{12} \dot{q}_{123} c_3 + l_1 l_3 \dot{q}_1 \dot{q}_{123} c_{23} v c 3 2 = l 1 2 q ˙ 1 2 + l 2 2 q ˙ 12 2 + ( 2 l 3 ) 2 q ˙ 123 2 + 2 l 1 l 2 q ˙ 1 q ˙ 12 c 2 + l 2 l 3 q ˙ 12 q ˙ 123 c 3 + l 1 l 3 q ˙ 1 q ˙ 123 c 23 kinetic energy
1 2 m 3 v c 3 2 = 1 2 m 3 l 1 2 q ˙ 1 2 + 1 2 m 3 l 2 2 q ˙ 12 2 + 1 8 m 3 l 3 2 q ˙ 123 2 + m 3 l 1 l 2 q ˙ 1 q ˙ 12 c 2 + 1 2 m 3 l 2 l 3 q ˙ 12 q ˙ 123 c 3 + 1 2 m 3 l 1 l 3 q ˙ 1 q ˙ 123 c 23 \frac{1}{2}m_3v_{c3}^2 = \frac{1}{2}m_3l_1^2 \dot{q}_1^2 + \frac{1}{2}m_3l_2^2 \dot{q}_{12}^2 + \frac{1}{8}m_3l_3^2 \dot{q}_{123}^2 \\
+ m_3 l_1 l_2 \dot{q}_1 \dot{q}_{12} c_2 + \frac{1}{2}m_3 l_2 l_3 \dot{q}_{12} \dot{q}_{123} c_3 + \frac{1}{2}m_3 l_1 l_3 \dot{q}_1 \dot{q}_{123} c_{23} 2 1 m 3 v c 3 2 = 2 1 m 3 l 1 2 q ˙ 1 2 + 2 1 m 3 l 2 2 q ˙ 12 2 + 8 1 m 3 l 3 2 q ˙ 123 2 + m 3 l 1 l 2 q ˙ 1 q ˙ 12 c 2 + 2 1 m 3 l 2 l 3 q ˙ 12 q ˙ 123 c 3 + 2 1 m 3 l 1 l 3 q ˙ 1 q ˙ 123 c 23 Angular velocity:
ω 1 = θ ˙ 1 , ω 2 = θ ˙ 1 + θ ˙ 2 , ω 3 = θ ˙ 1 + θ ˙ 2 + θ ˙ 3 \omega_1 = \dot{\theta}_1, \quad \omega_2 = \dot{\theta}_1 + \dot{\theta}_2, \quad \omega_3 = \dot{\theta}_1 + \dot{\theta}_2 + \dot{\theta}_3 ω 1 = θ ˙ 1 , ω 2 = θ ˙ 1 + θ ˙ 2 , ω 3 = θ ˙ 1 + θ ˙ 2 + θ ˙ 3
I = 1 12 m l 2 I = \frac{1}{12}ml^2 I = 12 1 m l 2 link 1:
1 2 I 1 θ ˙ 1 2 = 1 24 m 1 l 1 2 θ ˙ 1 2 \frac{1}{2} I_1 \dot{\theta}_1^2 = \frac{1}{24} m_1 l_1^2 \dot{\theta}_1^2 2 1 I 1 θ ˙ 1 2 = 24 1 m 1 l 1 2 θ ˙ 1 2 link 2:
1 2 I 2 ( θ ˙ 1 2 + θ ˙ 2 2 + 2 θ ˙ 1 θ ˙ 2 ) \frac{1}{2} I_2 (\dot{\theta}_1^2 + \dot{\theta}_2^2 + 2\dot{\theta}_1\dot{\theta}_2) 2 1 I 2 ( θ ˙ 1 2 + θ ˙ 2 2 + 2 θ ˙ 1 θ ˙ 2 ) link 3:
1 2 I 3 ( θ ˙ 1 2 + θ ˙ 2 2 + θ ˙ 3 2 + 2 θ ˙ 1 θ ˙ 2 + 2 θ ˙ 2 θ ˙ 3 + 2 θ ˙ 1 θ ˙ 3 ) \frac{1}{2} I_3 (\dot{\theta}_1^2 + \dot{\theta}_2^2 + \dot{\theta}_3^2 + 2\dot{\theta}_1\dot{\theta}_2 + 2\dot{\theta}_2\dot{\theta}_3 + 2\dot{\theta}_1\dot{\theta}_3) 2 1 I 3 ( θ ˙ 1 2 + θ ˙ 2 2 + θ ˙ 3 2 + 2 θ ˙ 1 θ ˙ 2 + 2 θ ˙ 2 θ ˙ 3 + 2 θ ˙ 1 θ ˙ 3 ) K 1 = ( 1 8 m 1 l 1 2 + 1 24 m 1 l 1 2 ) θ ˙ 1 2 = 1 6 m 1 l 1 2 θ ˙ 1 2 K_1 = \left( \frac{1}{8} m_1 l_1^2 + \frac{1}{24} m_1 l_1^2 \right) \dot{\theta}_1^2 = \mathbf{\frac{1}{6} m_1 l_1^2 \dot{\theta}_1^2} K 1 = ( 8 1 m 1 l 1 2 + 24 1 m 1 l 1 2 ) θ ˙ 1 2 = 6 1 m 1 l 1 2 θ ˙ 1 2 K 2 = 1 2 m 2 l 1 2 θ ˙ 1 2 + 1 6 m 2 l 2 2 ( θ ˙ 1 + θ ˙ 2 ) 2 + 1 2 m 2 l 1 l 2 θ ˙ 1 ( θ ˙ 1 + θ ˙ 2 ) cos θ 2 K_2 = \frac{1}{2} m_2 l_1^2 \dot{\theta}_1^2 + \mathbf{\frac{1}{6} m_2 l_2^2 (\dot{\theta}_1 + \dot{\theta}_2)^2} + \frac{1}{2} m_2 l_1 l_2 \dot{\theta}_1 (\dot{\theta}_1 + \dot{\theta}_2) \cos\theta_2 K 2 = 2 1 m 2 l 1 2 θ ˙ 1 2 + 6 1 m 2 l 2 2 ( θ ˙ 1 + θ ˙ 2 ) 2 + 2 1 m 2 l 1 l 2 θ ˙ 1 ( θ ˙ 1 + θ ˙ 2 ) cos θ 2 K 3 = 1 2 m 3 l 1 2 θ ˙ 1 2 + 1 2 m 3 l 2 2 ( θ ˙ 1 + θ ˙ 2 ) 2 + 1 6 m 3 l 3 2 ( θ ˙ 1 + θ ˙ 2 + θ ˙ 3 ) 2 + m 3 l 1 l 2 θ ˙ 1 ( θ ˙ 1 + θ ˙ 2 ) cos θ 2 + 1 2 m 3 l 2 l 3 ( θ ˙ 1 + θ ˙ 2 ) ( θ ˙ 1 + θ ˙ 2 + θ ˙ 3 ) cos θ 3 + 1 2 m 3 l 1 l 3 θ ˙ 1 ( θ ˙ 1 + θ ˙ 2 + θ ˙ 3 ) cos ( θ 2 + θ 3 ) \begin{aligned}
K_3 = & \frac{1}{2} m_3 l_1^2 \dot{\theta}_1^2 + \frac{1}{2} m_3 l_2^2 (\dot{\theta}_1 + \dot{\theta}_2)^2 + \mathbf{\frac{1}{6} m_3 l_3^2 (\dot{\theta}_1 + \dot{\theta}_2 + \dot{\theta}_3)^2} \\
& + m_3 l_1 l_2 \dot{\theta}_1 (\dot{\theta}_1 + \dot{\theta}_2) \cos\theta_2 \\
& + \frac{1}{2} m_3 l_2 l_3 (\dot{\theta}_1 + \dot{\theta}_2) (\dot{\theta}_1 + \dot{\theta}_2 + \dot{\theta}_3) \cos\theta_3 \\
& + \frac{1}{2} m_3 l_1 l_3 \dot{\theta}_1 (\dot{\theta}_1 + \dot{\theta}_2 + \dot{\theta}_3) \cos(\theta_2 + \theta_3)
\end{aligned} K 3 = 2 1 m 3 l 1 2 θ ˙ 1 2 + 2 1 m 3 l 2 2 ( θ ˙ 1 + θ ˙ 2 ) 2 + 6 1 m 3 l 3 2 ( θ ˙ 1 + θ ˙ 2 + θ ˙ 3 ) 2 + m 3 l 1 l 2 θ ˙ 1 ( θ ˙ 1 + θ ˙ 2 ) cos θ 2 + 2 1 m 3 l 2 l 3 ( θ ˙ 1 + θ ˙ 2 ) ( θ ˙ 1 + θ ˙ 2 + θ ˙ 3 ) cos θ 3 + 2 1 m 3 l 1 l 3 θ ˙ 1 ( θ ˙ 1 + θ ˙ 2 + θ ˙ 3 ) cos ( θ 2 + θ 3 ) total kinetic energy K
K = D 1 q ˙ 1 2 + D 2 q ˙ 12 2 + D 3 q ˙ 123 2 + D 12 c 2 q ˙ 1 q ˙ 12 + D 23 c 3 q ˙ 12 q ˙ 123 + D 13 c 23 q ˙ 1 q ˙ 123 K = D_1 \dot{q}_1^2 + D_2 \dot{q}_{12}^2 + D_3 \dot{q}_{123}^2 + D_{12} c_2 \dot{q}_1 \dot{q}_{12} + D_{23} c_3 \dot{q}_{12} \dot{q}_{123} + D_{13} c_{23} \dot{q}_1 \dot{q}_{123} K = D 1 q ˙ 1 2 + D 2 q ˙ 12 2 + D 3 q ˙ 123 2 + D 12 c 2 q ˙ 1 q ˙ 12 + D 23 c 3 q ˙ 12 q ˙ 123 + D 13 c 23 q ˙ 1 q ˙ 123 where,
D 1 = ( 1 6 m 1 + 1 2 m 2 + 1 2 m 3 ) l 1 2 D 2 = ( 1 6 m 2 + 1 2 m 3 ) l 2 2 D 3 = 1 6 m 3 l 3 2 D 12 = ( 1 2 m 2 + m 3 ) l 1 l 2 D 23 = 1 2 m 3 l 2 l 3 D 13 = 1 2 m 3 l 1 l 3 \begin{align*}
D_1 &= (\frac{1}{6}m_1 + \frac{1}{2}m_2 + \frac{1}{2}m_3)l_1^2 \\
D_2 &= (\frac{1}{6}m_2 + \frac{1}{2}m_3)l_2^2 \\
D_3 &= \frac{1}{6}m_3 l_3^2 \\
D_{12} &= (\frac{1}{2}m_2 + m_3)l_1 l_2 \\
D_{23} &= \frac{1}{2}m_3 l_2 l_3 \\
D_{13} &= \frac{1}{2}m_3 l_1 l_3
\end{align*} D 1 D 2 D 3 D 12 D 23 D 13 = ( 6 1 m 1 + 2 1 m 2 + 2 1 m 3 ) l 1 2 = ( 6 1 m 2 + 2 1 m 3 ) l 2 2 = 6 1 m 3 l 3 2 = ( 2 1 m 2 + m 3 ) l 1 l 2 = 2 1 m 3 l 2 l 3 = 2 1 m 3 l 1 l 3 P = 1 2 m 1 g l 1 s 1 ⏟ P 1 + m 2 g ( l 1 s 1 + 1 2 l 2 s 12 ) ⏟ P 2 + m 3 g ( l 1 s 1 + l 2 s 12 + 1 2 l 3 s 123 ) ⏟ P 3 P = \underbrace{\frac{1}{2} m_1 g l_1 s_1}_{P_1} + \underbrace{m_2 g (l_1 s_1 + \frac{1}{2} l_2 s_{12})}_{P_2} + \underbrace{m_3 g (l_1 s_1 + l_2 s_{12} + \frac{1}{2} l_3 s_{123})}_{P_3} P = P 1 2 1 m 1 g l 1 s 1 + P 2 m 2 g ( l 1 s 1 + 2 1 l 2 s 12 ) + P 3 m 3 g ( l 1 s 1 + l 2 s 12 + 2 1 l 3 s 123 ) L = K − P L = K - P L = K − P
τ k = d d t ( ∂ L ∂ θ ˙ k ) − ∂ L ∂ θ k ( k = 1 , 2 , 3 ) \tau_k = \frac{d}{dt}\left(\frac{\partial L}{\partial \dot{\theta}_k}\right) - \frac{\partial L}{\partial \theta_k} \quad (k = 1, 2, 3) τ k = d t d ( ∂ θ ˙ k ∂ L ) − ∂ θ k ∂ L ( k = 1 , 2 , 3 ) τ 3 \tau_3 τ 3
∂ K ∂ θ ˙ 3 = ∂ K ∂ q ˙ 123 = 2 D 3 q ˙ 123 + D 23 c 3 q ˙ 12 + D 13 c 23 q ˙ 1 \frac{\partial K}{\partial \dot{\theta}_3} = \frac{\partial K}{\partial \dot{q}_{123}} = 2 D_3 \dot{q}_{123} + D_{23} c_3 \dot{q}_{12} + D_{13} c_{23} \dot{q}_1 ∂ θ ˙ 3 ∂ K = ∂ q ˙ 123 ∂ K = 2 D 3 q ˙ 123 + D 23 c 3 q ˙ 12 + D 13 c 23 q ˙ 1 d d t ( ∂ K ∂ θ ˙ 3 ) = 2 D 3 q ¨ 123 + D 23 c 3 q ¨ 12 + D 13 c 23 q ¨ 1 ⏟ angular velocity − D 23 s 3 θ ˙ 3 q ˙ 12 − D 13 s 23 ( θ ˙ 2 + θ ˙ 3 ) q ˙ 1 ⏟ v squared \frac{d}{dt}\left(\frac{\partial K}{\partial \dot{\theta}_3}\right) = \underbrace{2 D_3 \ddot{q}_{123} + D_{23} c_3 \ddot{q}_{12} + D_{13} c_{23} \ddot{q}_1}_{\text{angular velocity}} \underbrace{- D_{23} s_3 \dot{\theta}_3 \dot{q}_{12} - D_{13} s_{23} (\dot{\theta}_2 + \dot{\theta}_3) \dot{q}_1}_{\text{v squared}} d t d ( ∂ θ ˙ 3 ∂ K ) = angular velocity 2 D 3 q ¨ 123 + D 23 c 3 q ¨ 12 + D 13 c 23 q ¨ 1 v squared − D 23 s 3 θ ˙ 3 q ˙ 12 − D 13 s 23 ( θ ˙ 2 + θ ˙ 3 ) q ˙ 1 − ∂ K ∂ θ 3 = − ( − D 23 s 3 q ˙ 12 q ˙ 123 − D 13 s 23 q ˙ 1 q ˙ 123 ) = + D 23 s 3 q ˙ 12 q ˙ 123 + D 13 s 23 q ˙ 1 q ˙ 123 -\frac{\partial K}{\partial \theta_3} = -(- D_{23} s_3 \dot{q}_{12} \dot{q}_{123} - D_{13} s_{23} \dot{q}_1 \dot{q}_{123}) = + D_{23} s_3 \dot{q}_{12} \dot{q}_{123} + D_{13} s_{23} \dot{q}_1 \dot{q}_{123} − ∂ θ 3 ∂ K = − ( − D 23 s 3 q ˙ 12 q ˙ 123 − D 13 s 23 q ˙ 1 q ˙ 123 ) = + D 23 s 3 q ˙ 12 q ˙ 123 + D 13 s 23 q ˙ 1 q ˙ 123 τ 3 = 2 D 3 q ¨ 123 + D 23 c 3 q ¨ 12 + D 13 c 23 q ¨ 1 + D 23 s 3 q ˙ 12 2 + D 13 s 23 q ˙ 1 2 + G 3 \tau_3 = 2 D_3 \ddot{q}_{123} + D_{23} c_3 \ddot{q}_{12} + D_{13} c_{23} \ddot{q}_1 + D_{23} s_3 \dot{q}_{12}^2 + D_{13} s_{23} \dot{q}_1^2 + G_3 τ 3 = 2 D 3 q ¨ 123 + D 23 c 3 q ¨ 12 + D 13 c 23 q ¨ 1 + D 23 s 3 q ˙ 12 2 + D 13 s 23 q ˙ 1 2 + G 3 where,
G 3 = 1 2 m 3 g l 3 c 123 G_3 = \frac{1}{2}m_3 g l_3 c_{123} G 3 = 2 1 m 3 g l 3 c 123 τ 2 \tau_2 τ 2
∂ K ∂ θ ˙ 2 = ∂ K ∂ q ˙ 12 + ∂ K ∂ q ˙ 123 \frac{\partial K}{\partial \dot{\theta}_2} = \frac{\partial K}{\partial \dot{q}_{12}} + \frac{\partial K}{\partial \dot{q}_{123}} ∂ θ ˙ 2 ∂ K = ∂ q ˙ 12 ∂ K + ∂ q ˙ 123 ∂ K ∂ K ∂ θ ˙ 2 = ( 2 D 2 + D 23 c 3 ) q ˙ 12 + ( 2 D 3 + D 23 c 3 ) q ˙ 123 + ( D 12 c 2 + D 13 c 23 ) q ˙ 1 \frac{\partial K}{\partial \dot{\theta}_2} = (2 D_2 + D_{23} c_3) \dot{q}_{12} + (2 D_3 + D_{23} c_3) \dot{q}_{123} + (D_{12} c_2 + D_{13} c_{23}) \dot{q}_1 ∂ θ ˙ 2 ∂ K = ( 2 D 2 + D 23 c 3 ) q ˙ 12 + ( 2 D 3 + D 23 c 3 ) q ˙ 123 + ( D 12 c 2 + D 13 c 23 ) q ˙ 1 d d t ( ∂ K ∂ θ ˙ 2 ) = ( 2 D 2 + D 23 c 3 ) q ¨ 12 + ( 2 D 3 + D 23 c 3 ) q ¨ 123 + ( D 12 c 2 + D 13 c 23 ) q ¨ 1 − D 23 s 3 θ ˙ 3 q ˙ 12 − D 23 s 3 θ ˙ 3 q ˙ 123 − D 12 s 2 θ ˙ 2 q ˙ 1 − D 13 s 23 ( θ ˙ 2 + θ ˙ 3 ) q ˙ 1 \frac{d}{dt}\left(\frac{\partial K}{\partial \dot{\theta}_2}\right) =
(2 D_2 + D_{23} c_3) \ddot{q}_{12} + (2 D_3 + D_{23} c_3) \ddot{q}_{123} + (D_{12} c_2 + D_{13} c_{23}) \ddot{q}_1 \\
- D_{23} s_3 \dot{\theta}_3 \dot{q}_{12} - D_{23} s_3 \dot{\theta}_3 \dot{q}_{123} - D_{12} s_2 \dot{\theta}_2 \dot{q}_1 - D_{13} s_{23} (\dot{\theta}_2 + \dot{\theta}_3) \dot{q}_1 d t d ( ∂ θ ˙ 2 ∂ K ) = ( 2 D 2 + D 23 c 3 ) q ¨ 12 + ( 2 D 3 + D 23 c 3 ) q ¨ 123 + ( D 12 c 2 + D 13 c 23 ) q ¨ 1 − D 23 s 3 θ ˙ 3 q ˙ 12 − D 23 s 3 θ ˙ 3 q ˙ 123 − D 12 s 2 θ ˙ 2 q ˙ 1 − D 13 s 23 ( θ ˙ 2 + θ ˙ 3 ) q ˙ 1 − ∂ K ∂ θ 2 = − ( − D 12 s 2 q ˙ 1 q ˙ 12 − D 13 s 23 q ˙ 1 q ˙ 123 ) = + D 12 s 2 q ˙ 1 q ˙ 12 + D 13 s 23 q ˙ 1 q ˙ 123 -\frac{\partial K}{\partial \theta_2} = -(- D_{12} s_2 \dot{q}_1 \dot{q}_{12} - D_{13} s_{23} \dot{q}_1 \dot{q}_{123}) = + D_{12} s_2 \dot{q}_1 \dot{q}_{12} + D_{13} s_{23} \dot{q}_1 \dot{q}_{123} − ∂ θ 2 ∂ K = − ( − D 12 s 2 q ˙ 1 q ˙ 12 − D 13 s 23 q ˙ 1 q ˙ 123 ) = + D 12 s 2 q ˙ 1 q ˙ 12 + D 13 s 23 q ˙ 1 q ˙ 123 τ 2 = ( 2 D 2 + D 23 c 3 ) q ¨ 12 + ( 2 D 3 + D 23 c 3 ) q ¨ 123 + ( D 12 c 2 + D 13 c 23 ) q ¨ 1 + D 12 s 2 q ˙ 1 2 + D 13 s 23 q ˙ 1 2 − D 23 s 3 ( 2 q ˙ 12 θ ˙ 3 + θ ˙ 3 2 ) + G 2 \tau_2 = (2 D_2 + D_{23} c_3) \ddot{q}_{12} + (2 D_3 + D_{23} c_3) \ddot{q}_{123} + (D_{12} c_2 + D_{13} c_{23}) \ddot{q}_1
\\ + D_{12} s_2 \dot{q}_1^2 + D_{13} s_{23} \dot{q}_1^2 - D_{23} s_3 (2 \dot{q}_{12} \dot{\theta}_3 + \dot{\theta}_3^2) + G_2 τ 2 = ( 2 D 2 + D 23 c 3 ) q ¨ 12 + ( 2 D 3 + D 23 c 3 ) q ¨ 123 + ( D 12 c 2 + D 13 c 23 ) q ¨ 1 + D 12 s 2 q ˙ 1 2 + D 13 s 23 q ˙ 1 2 − D 23 s 3 ( 2 q ˙ 12 θ ˙ 3 + θ ˙ 3 2 ) + G 2 where,
G 2 = ( m 2 l 2 2 + m 3 l 2 ) g c 12 + 1 2 m 3 g l 3 c 123 G_2 = (m_2 \frac{l_2}{2} + m_3 l_2)g c_{12} + \frac{1}{2}m_3 g l_3 c_{123} G 2 = ( m 2 2 l 2 + m 3 l 2 ) g c 12 + 2 1 m 3 g l 3 c 123 τ 1 \tau_1 τ 1
∂ K ∂ θ ˙ 1 = ∂ K ∂ q ˙ 1 + ∂ K ∂ q ˙ 12 + ∂ K ∂ q ˙ 123 \frac{\partial K}{\partial \dot{\theta}_1} = \frac{\partial K}{\partial \dot{q}_1} + \frac{\partial K}{\partial \dot{q}_{12}} + \frac{\partial K}{\partial \dot{q}_{123}} ∂ θ ˙ 1 ∂ K = ∂ q ˙ 1 ∂ K + ∂ q ˙ 12 ∂ K + ∂ q ˙ 123 ∂ K τ 1 = [ ( 2 D 1 + 2 D 2 + 2 D 3 ) + 2 D 12 c 2 + 2 D 23 c 3 + 2 D 13 c 23 ] θ ¨ 1 + [ ( 2 D 2 + 2 D 3 ) + D 12 c 2 + 2 D 23 c 3 + D 13 c 23 ] θ ¨ 2 + [ 2 D 3 + D 23 c 3 + D 13 c 23 ] θ ¨ 3 − D 12 s 2 ( 2 q ˙ 1 θ ˙ 2 + θ ˙ 2 2 ) − D 23 s 3 ( 2 q ˙ 12 θ ˙ 3 + θ ˙ 3 2 ) − D 13 s 23 [ 2 q ˙ 1 ( θ ˙ 2 + θ ˙ 3 ) + ( θ ˙ 2 + θ ˙ 3 ) 2 ] + G 1 \begin{aligned}
\tau_1 = & \left[ (2D_1 + 2D_2 + 2D_3) + 2D_{12}c_2 + 2D_{23}c_3 + 2D_{13}c_{23} \right] \ddot{\theta}_1 \\
& + \left[ (2D_2 + 2D_3) + D_{12}c_2 + 2D_{23}c_3 + D_{13}c_{23} \right] \ddot{\theta}_2 \\
& + \left[ 2D_3 + D_{23}c_3 + D_{13}c_{23} \right] \ddot{\theta}_3 \\
& - D_{12} s_2 (2\dot{q}_1 \dot{\theta}_2 + \dot{\theta}_2^2) - D_{23} s_3 (2\dot{q}_{12} \dot{\theta}_3 + \dot{\theta}_3^2) - D_{13} s_{23} \left[ 2\dot{q}_1 (\dot{\theta}_2+\dot{\theta}_3) + (\dot{\theta}_2+\dot{\theta}_3)^2 \right] \\
& + G_1
\end{aligned} τ 1 = [ ( 2 D 1 + 2 D 2 + 2 D 3 ) + 2 D 12 c 2 + 2 D 23 c 3 + 2 D 13 c 23 ] θ ¨ 1 + [ ( 2 D 2 + 2 D 3 ) + D 12 c 2 + 2 D 23 c 3 + D 13 c 23 ] θ ¨ 2 + [ 2 D 3 + D 23 c 3 + D 13 c 23 ] θ ¨ 3 − D 12 s 2 ( 2 q ˙ 1 θ ˙ 2 + θ ˙ 2 2 ) − D 23 s 3 ( 2 q ˙ 12 θ ˙ 3 + θ ˙ 3 2 ) − D 13 s 23 [ 2 q ˙ 1 ( θ ˙ 2 + θ ˙ 3 ) + ( θ ˙ 2 + θ ˙ 3 ) 2 ] + G 1 The inertia matrix is symmetric:
M ( θ ) = [ M 11 M 12 M 13 M 21 M 22 M 23 M 31 M 32 M 33 ] M(\theta) =
\begin{bmatrix}
M_{11} & M_{12} & M_{13} \\
M_{21} & M_{22} & M_{23} \\
M_{31} & M_{32} & M_{33}
\end{bmatrix} M ( θ ) = M 11 M 21 M 31 M 12 M 22 M 32 M 13 M 23 M 33 M 11 = 2 D 1 + 2 D 2 + 2 D 3 + 2 D 12 cos θ 2 + 2 D 23 cos θ 3 + 2 D 13 cos ( θ 2 + θ 3 ) M_{11} = 2D_1 + 2D_2 + 2D_3 + 2D_{12} \cos\theta_2 + 2D_{23} \cos\theta_3 + 2D_{13} \cos(\theta_2+\theta_3) M 11 = 2 D 1 + 2 D 2 + 2 D 3 + 2 D 12 cos θ 2 + 2 D 23 cos θ 3 + 2 D 13 cos ( θ 2 + θ 3 ) M 12 = 2 D 2 + 2 D 3 + D 12 cos θ 2 + 2 D 23 cos θ 3 + D 13 cos ( θ 2 + θ 3 ) M_{12} = 2D_2 + 2D_3 + D_{12} \cos\theta_2 + 2D_{23} \cos\theta_3 + D_{13} \cos(\theta_2+\theta_3) M 12 = 2 D 2 + 2 D 3 + D 12 cos θ 2 + 2 D 23 cos θ 3 + D 13 cos ( θ 2 + θ 3 ) M 13 = 2 D 3 + D 23 cos θ 3 + D 13 cos ( θ 2 + θ 3 ) M_{13} = 2D_3 + D_{23} \cos\theta_3 + D_{13} \cos(\theta_2+\theta_3) M 13 = 2 D 3 + D 23 cos θ 3 + D 13 cos ( θ 2 + θ 3 ) M 22 = 2 D 2 + 2 D 3 + 2 D 23 cos θ 3 M_{22} = 2D_2 + 2D_3 + 2D_{23} \cos\theta_3 M 22 = 2 D 2 + 2 D 3 + 2 D 23 cos θ 3 M 23 = 2 D 3 + D 23 cos θ 3 M_{23} = 2D_3 + D_{23} \cos\theta_3 M 23 = 2 D 3 + D 23 cos θ 3 M 33 = 2 D 3 M_{33} = 2D_3 M 33 = 2 D 3 V ( θ , θ ˙ ) = [ V 1 V 2 V 3 ] V(\theta, \dot{\theta}) =
\begin{bmatrix}
V_1 \\
V_2 \\
V_3
\end{bmatrix} V ( θ , θ ˙ ) = V 1 V 2 V 3 V 1 = − D 12 sin θ 2 ( 2 q ˙ 1 θ ˙ 2 + θ ˙ 2 2 ) − D 23 sin θ 3 ( 2 q ˙ 12 θ ˙ 3 + θ ˙ 3 2 ) − D 13 sin ( θ 2 + θ 3 ) [ 2 q ˙ 1 ( θ ˙ 2 + θ ˙ 3 ) + ( θ ˙ 2 + θ ˙ 3 ) 2 ] V_1 = - D_{12} \sin\theta_2 (2\dot{q}_1 \dot{\theta}_2 + \dot{\theta}_2^2) - D_{23} \sin\theta_3 (2\dot{q}_{12} \dot{\theta}_3 + \dot{\theta}_3^2) \\
- D_{13} \sin(\theta_2+\theta_3) \left[ 2\dot{q}_1 (\dot{\theta}_2+\dot{\theta}_3) + (\dot{\theta}_2+\dot{\theta}_3)^2 \right] V 1 = − D 12 sin θ 2 ( 2 q ˙ 1 θ ˙ 2 + θ ˙ 2 2 ) − D 23 sin θ 3 ( 2 q ˙ 12 θ ˙ 3 + θ ˙ 3 2 ) − D 13 sin ( θ 2 + θ 3 ) [ 2 q ˙ 1 ( θ ˙ 2 + θ ˙ 3 ) + ( θ ˙ 2 + θ ˙ 3 ) 2 ] V 2 = D 12 sin θ 2 q ˙ 1 2 + D 13 sin ( θ 2 + θ 3 ) q ˙ 1 2 − D 23 sin θ 3 ( 2 q ˙ 12 θ ˙ 3 + θ ˙ 3 2 ) V_2 = D_{12} \sin\theta_2 \dot{q}_1^2 + D_{13} \sin(\theta_2+\theta_3) \dot{q}_1^2 - D_{23} \sin\theta_3 (2 \dot{q}_{12} \dot{\theta}_3 + \dot{\theta}_3^2) V 2 = D 12 sin θ 2 q ˙ 1 2 + D 13 sin ( θ 2 + θ 3 ) q ˙ 1 2 − D 23 sin θ 3 ( 2 q ˙ 12 θ ˙ 3 + θ ˙ 3 2 ) V 3 = D 23 sin θ 3 q ˙ 12 2 + D 13 sin ( θ 2 + θ 3 ) q ˙ 1 2 V_3 = D_{23} \sin\theta_3 \dot{q}_{12}^2 + D_{13} \sin(\theta_2+\theta_3) \dot{q}_1^2 V 3 = D 23 sin θ 3 q ˙ 12 2 + D 13 sin ( θ 2 + θ 3 ) q ˙ 1 2 G ( θ ) = [ G 1 G 2 G 3 ] G(\theta) =
\begin{bmatrix}
G_1 \\
G_2 \\
G_3
\end{bmatrix} G ( θ ) = G 1 G 2 G 3 G 1 = ( 1 2 m 1 + m 2 + m 3 ) g l 1 c 1 + ( 1 2 m 2 + m 3 ) g l 2 c 12 + 1 2 m 3 g l 3 c 123 G_1 = (\frac{1}{2}m_1 + m_2 + m_3)g l_1 c_{1} + (\frac{1}{2}m_2 + m_3)g l_2 c_{12} + \frac{1}{2}m_3 g l_3 c_{123} G 1 = ( 2 1 m 1 + m 2 + m 3 ) g l 1 c 1 + ( 2 1 m 2 + m 3 ) g l 2 c 12 + 2 1 m 3 g l 3 c 123 G 2 = ( 1 2 m 2 + m 3 ) g l 2 c 12 + 1 2 m 3 g l 3 c 123 G_2 = (\frac{1}{2}m_2 + m_3)g l_2 c_{12} + \frac{1}{2}m_3 g l_3 c_{123} G 2 = ( 2 1 m 2 + m 3 ) g l 2 c 12 + 2 1 m 3 g l 3 c 123 G 3 = 1 2 m 3 g l 3 c 123 G_3 = \frac{1}{2}m_3 g l_3 c_{123} G 3 = 2 1 m 3 g l 3 c 123 m 1 = m 2 = m 3 = 1 k g m_1=m_2=m_3=1 kg m 1 = m 2 = m 3 = 1 k g l 1 = l 2 = l 3 = 0.3 m l_1=l_2=l_3=0.3 m l 1 = l 2 = l 3 = 0.3 m
x = l 1 c 1 + l 2 c 12 + l 3 c 123
x = l_1c_{1}
+ l_2c_{12}
+ l_3c_{123}
x = l 1 c 1 + l 2 c 12 + l 3 c 123 y = l 1 s 1 + l 2 s 12 + l 3 s 123
y = l_1s_{1}
+ l_2s_{12}
+ l_3s_{123}
y = l 1 s 1 + l 2 s 12 + l 3 s 123 J = [ − l 1 s 1 − l 2 s 12 − l 3 s 123 − l 2 s 12 − l 3 s 123 − l 3 s 123 l 1 c 1 + l 2 c 12 + l 3 c 123 l 2 c 12 + l 3 c 123 l 3 c 123 ] J =
\begin{bmatrix}
-l_1s_{1}
- l_2s_{12}
- l_3s_{123}
&
-l_2s_{12}
- l_3s_{123}
&
-l_3s_{123}
\\
l_1c_{1}
+ l_2c_{12}
+ l_3c_{123}
&
l_2c_{12}
+ l_3c_{123}
&
l_3c_{123}
\end{bmatrix} J = [ − l 1 s 1 − l 2 s 12 − l 3 s 123 l 1 c 1 + l 2 c 12 + l 3 c 123 − l 2 s 12 − l 3 s 123 l 2 c 12 + l 3 c 123 − l 3 s 123 l 3 c 123 ] x ˙ = J q ˙ \dot{\mathbf{x}} = J\dot{\mathbf{q}} x ˙ = J q ˙ Position error:
e = [ x d y d ] − [ x y ] \mathbf{e}
=
\begin{bmatrix}
x_d \\
y_d
\end{bmatrix}
-
\begin{bmatrix}
x \\
y
\end{bmatrix} e = [ x d y d ] − [ x y ] Velocity error:
e ˙ = [ x ˙ d y ˙ d ] − x ˙ \dot{\mathbf{e}}
=
\begin{bmatrix}
\dot{x}_d \\
\dot{y}_d
\end{bmatrix}
-
\dot{\mathbf{x}} e ˙ = [ x ˙ d y ˙ d ] − x ˙ Control force:
F = K p e + K d e ˙ \mathbf{F}
=
K_p \mathbf{e}
+
K_d \dot{\mathbf{e}} F = K p e + K d e ˙ M ( q ) q ¨ + C ( q , q ˙ ) q ˙ + F q ˙ + g ( q ) = τ M(q)\ddot{q} + C(q,\dot{q})\dot{q} + F\dot{q} + g(q) = \tau M ( q ) q ¨ + C ( q , q ˙ ) q ˙ + F q ˙ + g ( q ) = τ τ = J T F + F q ˙ + g ( q ) \tau = J^{T}\mathbf{F} + F\dot{q} + g(q) τ = J T F + F q ˙ + g ( q ) q ¨ = M − 1 ( J T F − V ) \ddot{\mathbf{q}}
=
M^{-1}
\left(
J^{T}\mathbf{F} - \mathbf{V}
\right) q ¨ = M − 1 ( J T F − V ) where:
M M M J J J F \mathbf{F} F V \mathbf{V} V q ¨ \ddot{\mathbf{q}} q ¨
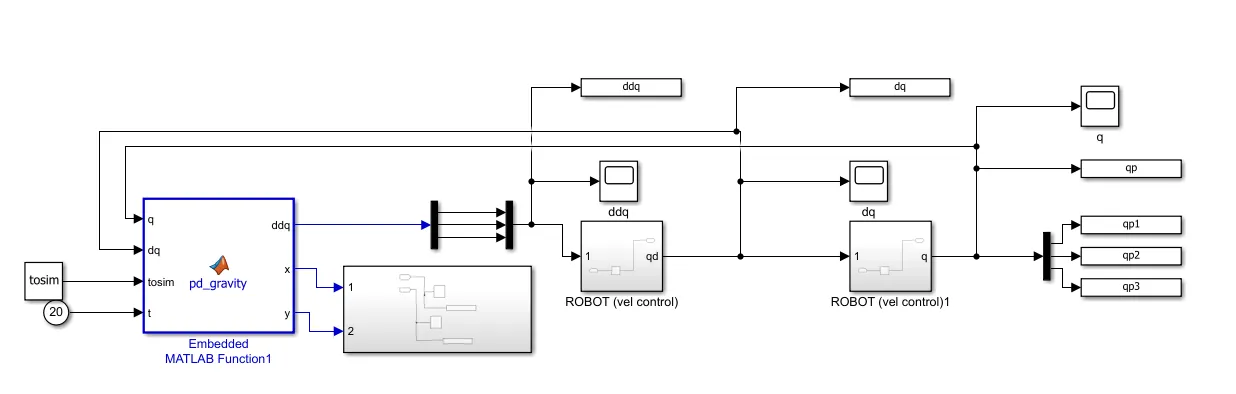
function [ ddq , x , y ] = pd_gravity ( q , dq , tosim , t )
% desired end-effector trajectory
% current end-effector position
x = l1*cos(th1) + l2*cos(th1+th2) + l3*cos(th1+th2+th3);
y = l1*sin(th1) + l2*sin(th1+th2) + l3*sin(th1+th2+th3);
J = [-l1*sin(th1)-l2*sin(th1+th2)-l3*sin(th1+th2+th3), ...
-l2*sin(th1+th2)-l3*sin(th1+th2+th3), ...
l1*cos(th1)+l2*cos(th1+th2)+l3*cos(th1+th2+th3), ...
l2*cos(th1+th2)+l3*cos(th1+th2+th3), ...
% current task-space velocity
D1 = m1*l1^2/ 6 + (m2 + m3)*l1^2/ 2 ;
D2 = m2*l2^2/ 6 + m3*l2^2/ 2 ;
M11 = 2 *D1 + 2 *D2 + 2 *D3 ...
+ 2 *D12*c2 + 2 *D23*c3 + 2 *D13*c23;
+ D12*c2 + 2 *D23*c3 + D13*c23;
M13 = 2 *D3 + D23*c3 + D13*c23;
M22 = 2 *D2 + 2 *D3 + 2 *D23*c3;
V1 = -D12*s2*( 2 *dq1*dth2 + dth2^2) ...
-D23*s3*( 2 *dq12*dth3 + dth3^2) ...
-D13*s23*( 2 *dq1*(dth2 + dth3) + (dth2 + dth3)^2);
- D23*s3*( 2 *dq12*dth3 + dth3^2);
% task-space PD with gravity compensation
End-effector position:
Define the task space trajectory, end-effector is in Cartesian plane over time:
Desired Position: X d ( t ) = [ x d ( t ) , y d ( t ) , ϕ d ( t ) ] T X_d(t) = [x_d(t), y_d(t), \phi_d(t)]^T X d ( t ) = [ x d ( t ) , y d ( t ) , ϕ d ( t ) ] T
Desired Velocity: X ˙ d ( t ) = [ x ˙ d ( t ) , y ˙ d ( t ) , ϕ ˙ d ( t ) ] T \dot{X}_d(t) = [\dot{x}_d(t), \dot{y}_d(t), \dot{\phi}_d(t)]^T X ˙ d ( t ) = [ x ˙ d ( t ) , y ˙ d ( t ) , ϕ ˙ d ( t ) ] T
At every time step of the control loop, feed the desired Cartesian position X d ( t ) X_d(t) X d ( t ) ( x , y ) (x,y) ( x , y ) θ \theta θ
q d ( t ) = IK ( X d ( t ) ) q_d(t) = \text{IK}(X_d(t)) q d ( t ) = IK ( X d ( t )) Use Jacobian matrix J ( q ) J(q) J ( q ) q ˙ d \dot{q}_d q ˙ d q d q_d q d
X ˙ = J ( q ) q ˙ \dot{X} = J(q)\dot{q} X ˙ = J ( q ) q ˙ q ˙ d ( t ) = J − 1 ( q d ) X ˙ d ( t ) \dot{q}_d(t) = J^{-1}(q_d) \dot{X}_d(t) q ˙ d ( t ) = J − 1 ( q d ) X ˙ d ( t ) Then feed into the existing joint space controller.
τ = K p ( q d ( t ) − q ) + K d ( q ˙ d ( t ) − q ˙ ) + G ( q ) \tau = K_p (q_d(t) - q) + K_d (\dot{q}_d(t) - \dot{q}) + G(q) τ = K p ( q d ( t ) − q ) + K d ( q ˙ d ( t ) − q ˙ ) + G ( q )  Start position:
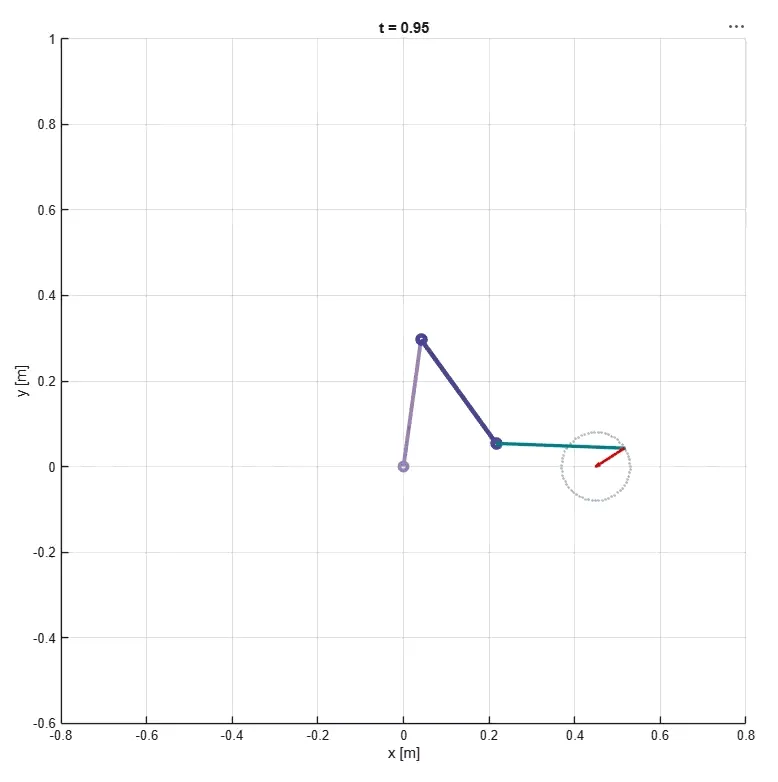
Start position:
 Stable trajectory:
Stable trajectory:
 GIF:
GIF: